
Sponsor: AFOSR (Pat Bradshaw), AFRL (Ric Wehling)
Investigators: PI: Sean Humbert (UMD/CU), Co-PIs: Graham Taylor (Oxford University), Holger Krapp (Imperial College)
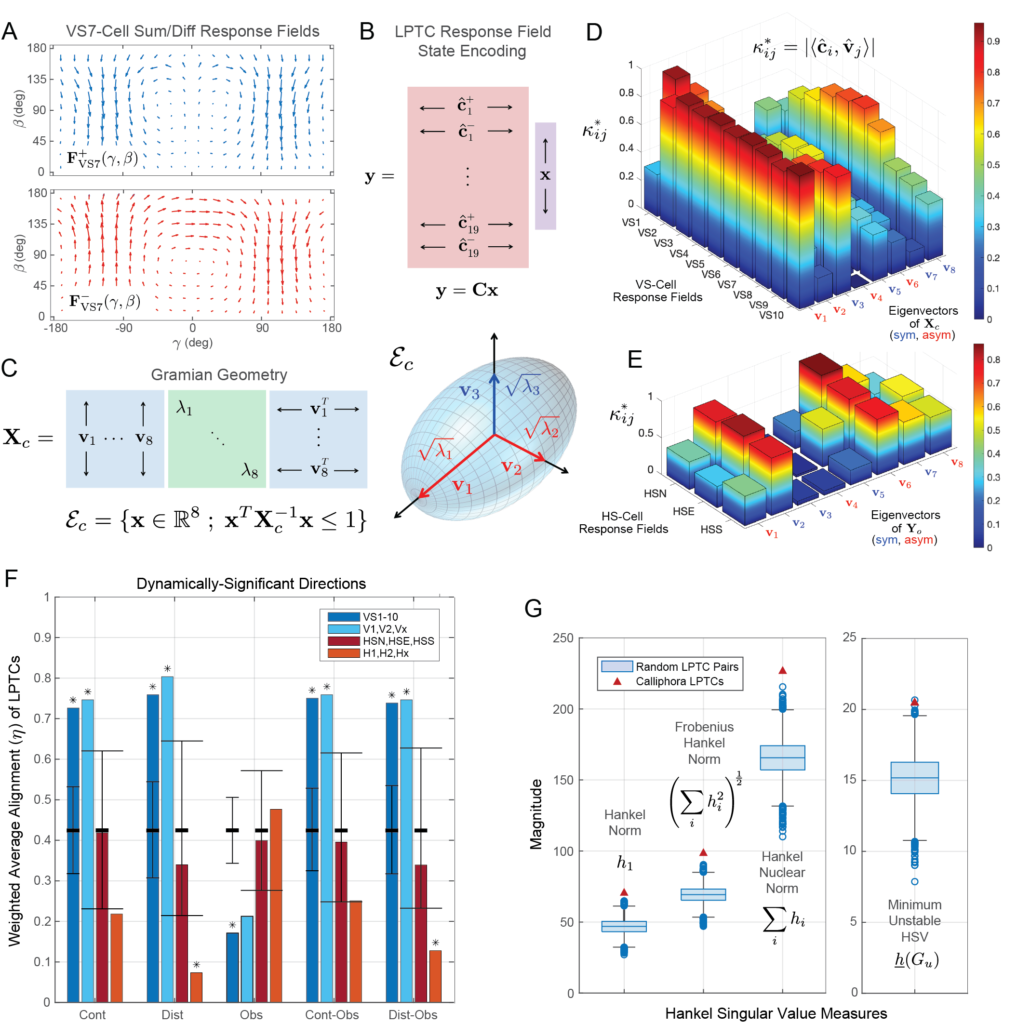
These studies have revealed a fundamental design principle in biological sensorimotor architectures: sensing is most effective when it is tuned to the dynamics and actuation of the body it serves. Using a physics-based model of blowfly flight together with electrophysiological measurements of visual neurons, we show that the fly’s motion vision system is aligned with the dynamically important directions of its flight dynamics, maximizing the transfer of signal energy from disturbances and control inputs to sensory outputs (Humbert et al.). Building on this discovery, this principle is transitioned to a synthesis framework for designing distributed sensing systems that match sensing characteristics to system dynamics and actuation (Turin et al.). By optimizing the jointly controllable and observable directions encoded by sensors using control-theoretic metrics such as Hankel singular values, the approach minimizes the control energy required for stabilization and improves robustness to uncertainty. Together, the results establish a new paradigm for bio-inspired robotics and autonomous vehicles in which sensing, actuation, and dynamics are co-designed to enable agile, efficient control with reduced computational overhead.
Publications
- Humbert JS, Krapp, HG, Baeder JD, Badrya C, Dawson IL, Huang JV, Hyslop A, Jung YS, Leroy A, Lutkus C, Mortimer B, Nagesh I, Ruah C, Walker SM, Yang Y, Zbikowski RW and Taylor GK, “Fly Motion Vision Maximizes Signal Energy Transfer between Mechanical Input and Sensory Output,” Science Robotics, Vol. 11, No. 12, 2026. DOI: 10.1126/scirobotics.adx7524.
- Turin Z, Taylor GH, Krapp KG, Jensen E and Humbert, JS, “Matching Sensing to Actuation and Dynamics in Distributed Sensorimotor Architectures,” IEEE Access, 2025 DOI: 10.1109/ACCESS.2025.3528343.
- Turin Z and Humbert, JS, “A New Noise-Covariance-Adjusted Hankel Singular Value Metric for Distributed Sensing Synthesis,” American Control Conference (ACC), Denver, CO, 2025.
- Krapp HG, Taylor GK, and Humbert JS, “The Natural Mode-Sensing Hypothesis: Matching Sensors, Actuators, and Flight Dynamics,” in Frontiers in Sensing – Biology and Engineering, Springer Verlag, 2011, ISBN: 978-3-211-99748-2.
- Badrya C, MacFarlane K, Baeder J, Humbert JS, “Insect Kinematics in Trimmed Flight at Low Reynolds Numbers Using CFD” 53rd AIAA Aerospace Sciences Meeting, AIAA SciTech, Orlando FL, January 2015.
- Hyslop AM, Krapp HG and Humbert JS, “Control Theoretic Interpretation of Directional Motion Preferences in Optic Flow Processing Interneurons,” Biological Cybernetics, Vol. 103, pp. 339-352, 2010, DOI: 10.1007/s00422-010-0404-8.
- Humbert JS, Hyslop AM, “HS Tangential Cell Analogues and Implications for Efficient Visuomotor Control,” in Frontiers in Sensing – Biology and Engineering, Springer Verlag, 2011, ISBN: 978-3-211-99748-2.