
Sponsor: DARPA
Investigators: PI: Andrew Browning (AeroVironment), Co-PI: Sean Humbert (CU), Holger Krapp (Imperial College), Geof Barrows (Centeye)
The best currently available artificial intelligence is highly dependent upon large volumes of data, and significant computational power, severely limiting applications for low-SWAP on-the-edge applications. Moreover, performance in the real-world rarely lives up to expectation, which is often acceptable for consumer applications but not for most industrial or defense related applications. In contrast, biological systems can learn to recognize behaviorally relevant objects from a single trial, and are capable of robust operation in highly complex, dynamic, and unknown environments. The simplest intelligent biological systems are insects, which can perform goal-directed activities, including goal recognition, goal prioritization, 3D environment understanding, and navigation with as few as 1000 neurons. We postulate that the key to their success with such limited computation is highly integrated sensing, computation, and actuation.
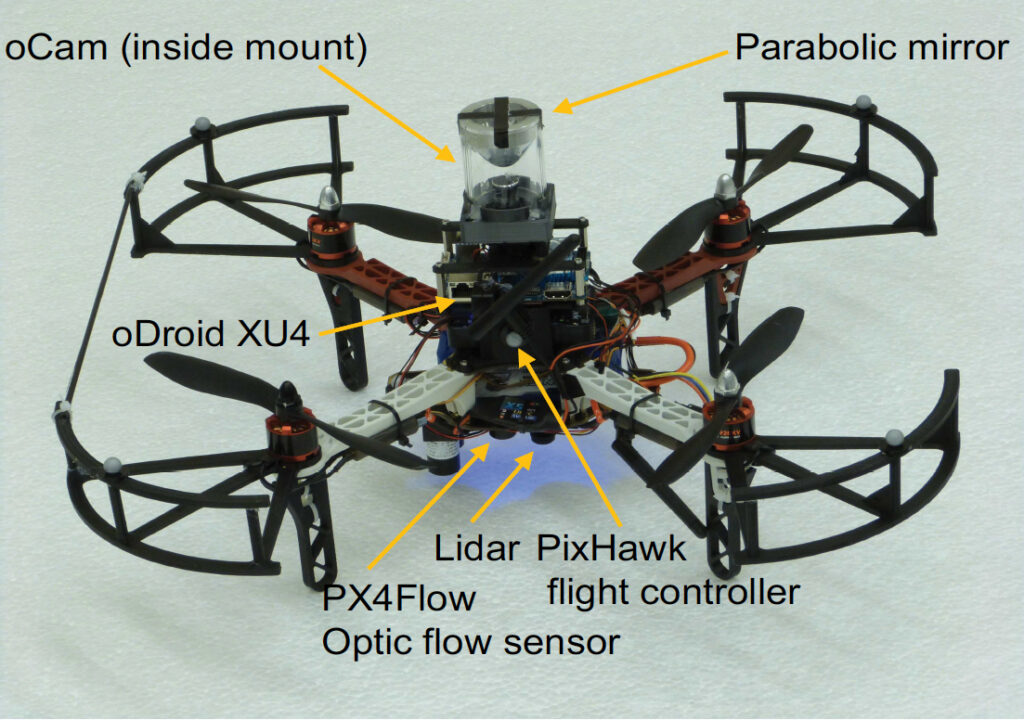
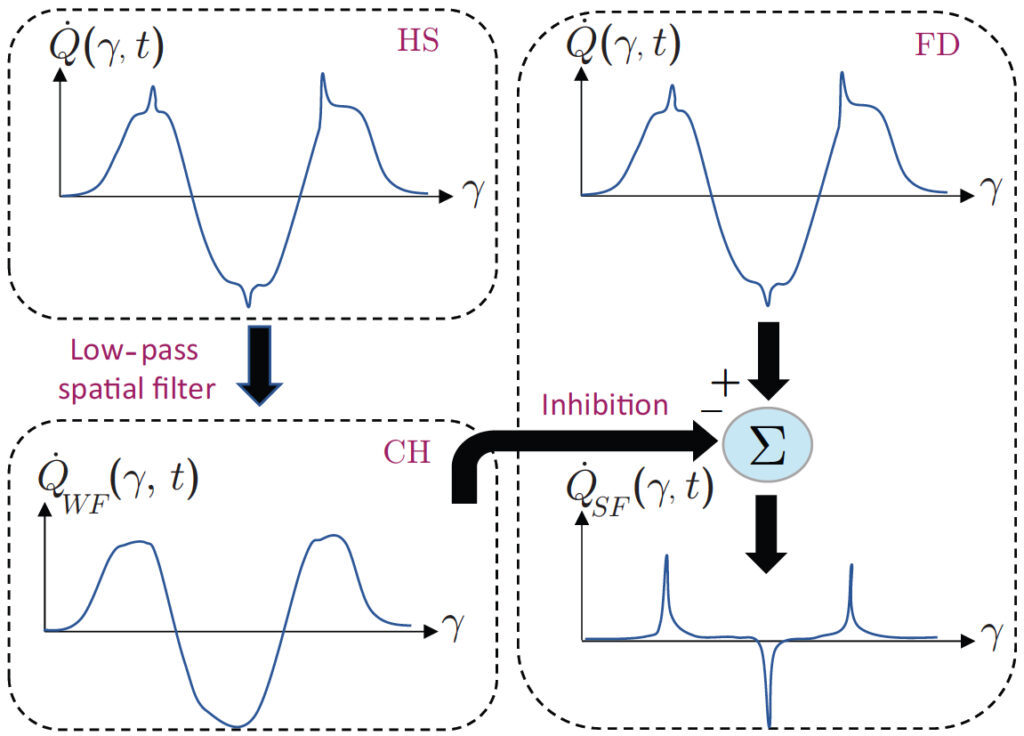
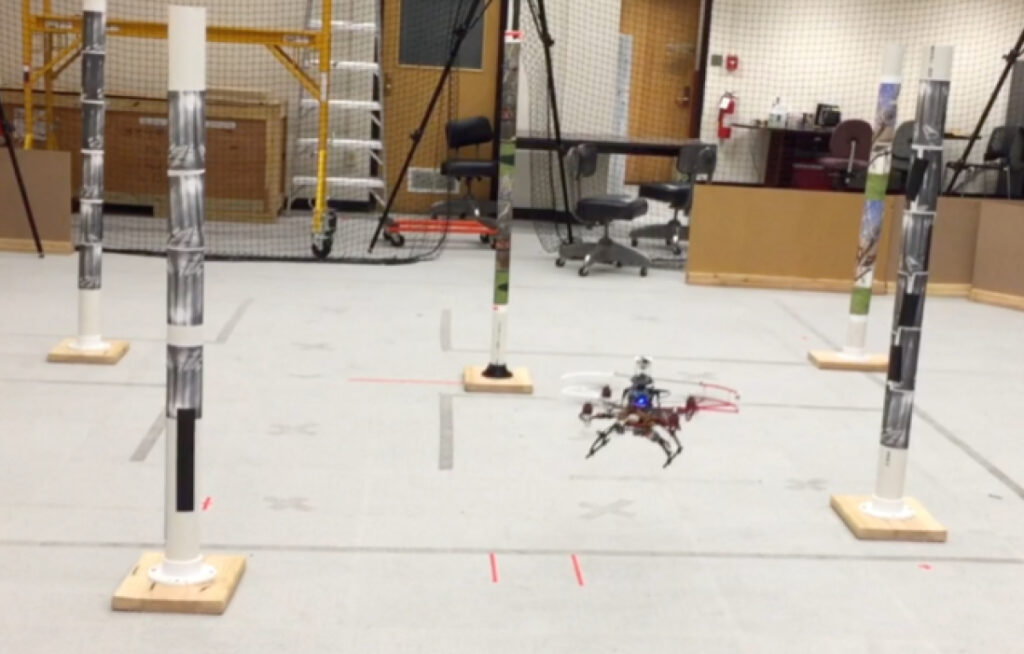
One experimental assay that highlights these challenges is small-object detection and avoidance in unknown environments for small autonomous vehicles that are generally highly agile and restricted in payload and computational processing power. Typical machine vision and range measurement based solutions suffer either from restricted fields-of-view or significant computational complexity, and are hence not easily portable to small platforms. In order to overcome these drawbacks, two novel bio-inspired approaches are proposed to extract information about small-field objects contained in planar optic flow. The proposed sensing and control scheme is experimentally validated with a quadrotor vehicle that is able to effectively navigate an unknown environment laden with small-field clutter. This bio-inspired approach is computationally efficient and serves as a robust, reflexive solution to the problem of small-object perception and avoidance for small autonomous robots.
Publications
- Escobar-Alvarez HD, Ohradzansky M, Keshavan J, Ranganathan BN and Humbert JS, “Bio-Inspired Approaches for Autonomous Small Object Perception and Avoidance,” IEEE Transactions on Robotics, Vol. 35, No. 5, 2019. DOI:10.1109/TRO.2019.2922472.
- Ahmad S, Turin Z and Humbert JS, “Bio-Inspired Obstacle Avoidance using Wavelet-Based Element Analysis,” 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE), Mexico City, Mexico, 2022, pp. 2307-2313, DOI: 10.1109/CASE49997.2022.992.
- Ohradzansky M, Escobar-Alvarez H, Keshavan J Ranganathan BN and Humbert JS, “Autonomous Bio-Inspired Small-Object Detection and Avoidance,” IEEE International Conference on Robotics and Automation, Brisbane, Australia, May 2018.