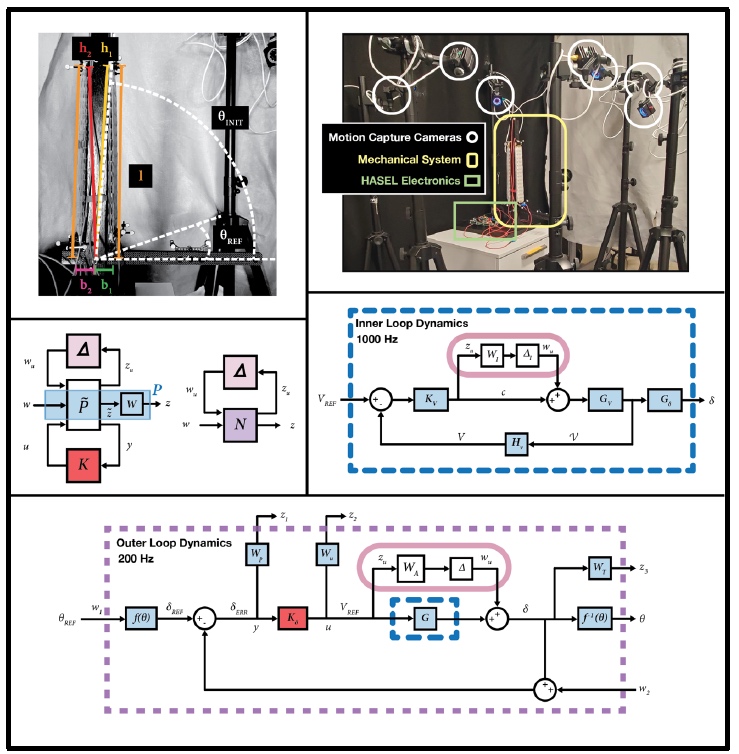
This work demonstrates robust control over a multi-input multi-output hydraulically amplified self-healing electrostatic (HASEL)-actuated self-sensing system. The controller synthesis framework presented exploits linear system control theory as it applies to a highly nonlinear soft robotic system. We employ extensions of Dynamic Mode Decomposition (DMD) to create appropriate linear models from real-world measurements. We build on the theory by developing linear models in various operational regions of the system to result in a collection of linear plants used in uncertainty analysis. To complement the uncertainty analyses, we utilize H- Infinity synthesis techniques to determine an optimal controller to meet performance requirements for the nominal plant. Lastly, we demonstrate the success of the control scheme by closing the loop around multi-channel capacitive self-sensing measurements integrated with high voltage actuation.
Publications
Volchko A, Mitchell SK, Scripps TG, Turin Z, Humbert JS, “Robust Control of Electrohydraulic Soft Robots,” Frontiers in Robotics and AI, 2024, 11:1333837. DOI: 10.3389/frobt.2024.1333837.
Volchko A, Mitchell SK, Morrissey TG and Humbert JS, “Model-Based Data-Driven System Identification and Controller Synthesis Framework for Precise Control of SISO and MISO HASEL-Powered Robotic Systems,” 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, UK, 2022, pp. 209-216, DOI: 10.1109/RoboSoft54090.2022.9762220.