
Sponsor: National Science Foundation (NSF)
Investigators: PI: Mark Rentschler (CU), Co-PI: Sean Humbert (CU), Christoph Keplinger (CU), Nikolaus Correll (CU)
The goal of this research is to gain a fundamental understanding of the integrated actuation, embedded sensing, reactive control, and distributed control needs of a cyber-physical, synthetic, distributed sensing, soft and modular tissue (sTISSUE). Realizing this cyber-physical, physiological testbed will enable surgically relevant tasks, procedures, and devices to be much more refined ahead of animal testing, which can be dramatically reduced with such high-fidelity simulators. Furthermore, such simulators could open an entirely new approach to medical resident training that could not only improve surgical performance skills, but also establish a new paradigm in patient-specific surgical practice before the actual procedure.
More broadly, this research will establish a crucial body of knowledge needed for the design of synthetic tissue materials that integrate sensing, actuation, computation, and control. While the proposed approach includes the goal to transition the fundamental research into a gastrointestinal simulator, numerous other applications in the field of medicine and co-robotics exist. The proposed strategy will also harness the excitement surrounding autonomous systems, robotic control, and embedded sensing, and leverage it with the Investigators’ exceptional infrastructure for education innovation and outreach to provide new, inspirational educational experiences for students.
Publications
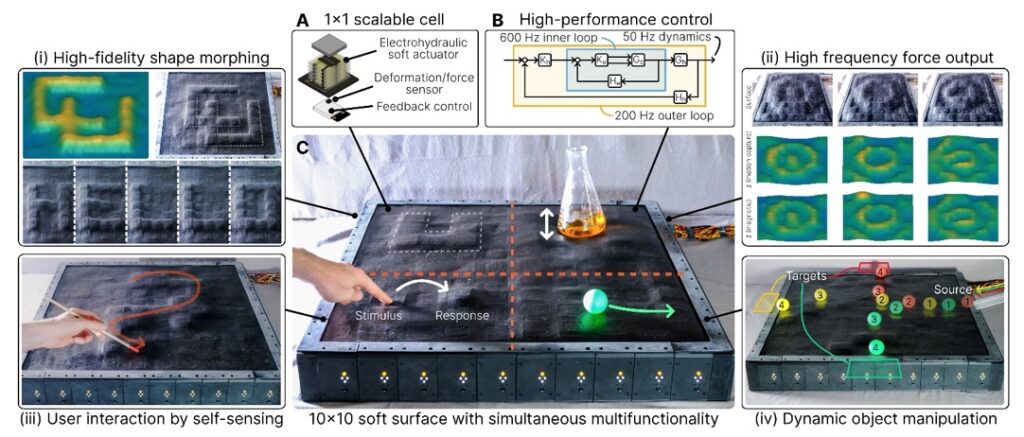
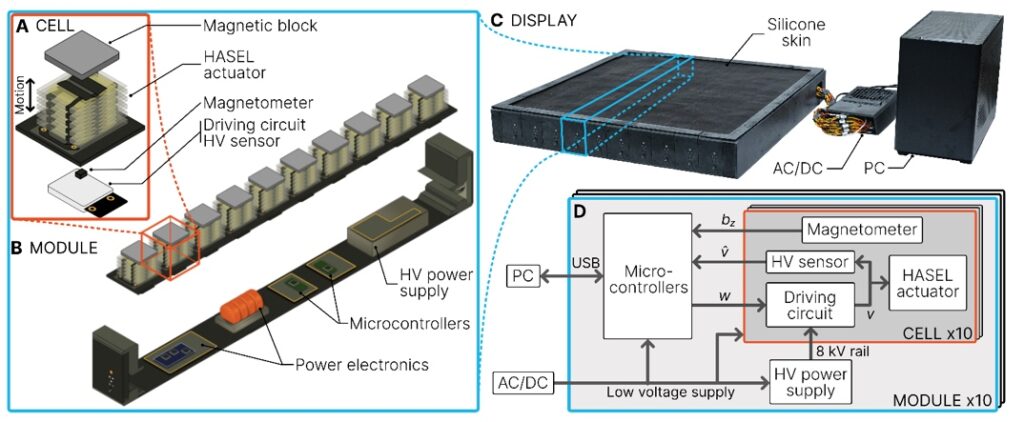
- Johnson BK, Naris M, Sundaram V, Volchko A, Ly K, Mitchell SK, Acome E, Kellaris, N, Keplinger C, Correll C, Humbert JS and Rentchler M, “A Multifunctional Soft Robotic Shape Display with High-Speed Actuation, Sensing and Control,” Nature Communications, Vol. 14, No. 1, 2023. DOI: 10.1038/s41467-023-39842-2.
- Sundaram V, Ly K, Johnson BK, Naris M, Anderson MP, Humbert JS, Correll N, Rentschler M, “Embedded Magnetic Sensing for Feedback Control of Soft HASEL Actuators,” IEEE Transactions on Robotics, 2022, DOI: 10.1109/TRO.2022.3200164.
- Volchko A, Mitchell SK, Morrissey TG and Humbert JS, “Model-Based Data-Driven System Identification and Controller Synthesis Framework for Precise Control of SISO and MISO HASEL-Powered Robotic Systems,” 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, UK, 2022, pp. 209-216, DOI: 10.1109/RoboSoft54090.2022.9762220.
- Ly K, Kellaris N, McMorris D, Johnson BK, Acome E, Sundaram V, Naris M, Humbert, JS, Rentschler ME, Correll N, “Miniaturized Circuitry for Capacitive Self-Sensing and Closed Loop Control of Soft Electrostatic Transducers,” Soft Robotics, 2020, DOI: 10.1089/SORO.2020.0048.
- Johnson B, Sundaram V, Naris M, Acome E, Ly KD, Correll N, Keplinger C, Humbert JS and Rentschler M, “Identification and Control of a Nonlinear Soft Actuator and Sensor System,” IEEE Robotics and Automation Letters, Vol. 5, No. 3, pp. 3783-3790, 2020, DOI: 10.1109/LRA.2020.2982056.
- Formosa G, Prendergast JM, Humbert JS and Rentschler ME, “Nonlinear Dynamic Modeling of a Robotic Endosopy Platform on Synthetic Tissue Substrates,” Journal of Dynamic Systems, Measurement and Control, Vol. 143, No. 1, 2021, DOI: 10.1115/1.4048190.