HomeProjectsCollision Avoidance and Local Guidance Based on Insect Visual Motion Processing
Collision Avoidance and Local Guidance Based on Insect Visual Motion Processing
Sponsor: AFRL-Eglin (Johnny Evers) Investigators: PI: Pat Shoemaker (Tanner Research, Inc.), Co-PIs: Sean Humbert (UMD), David O’Carroll (Univ of Adelaide)
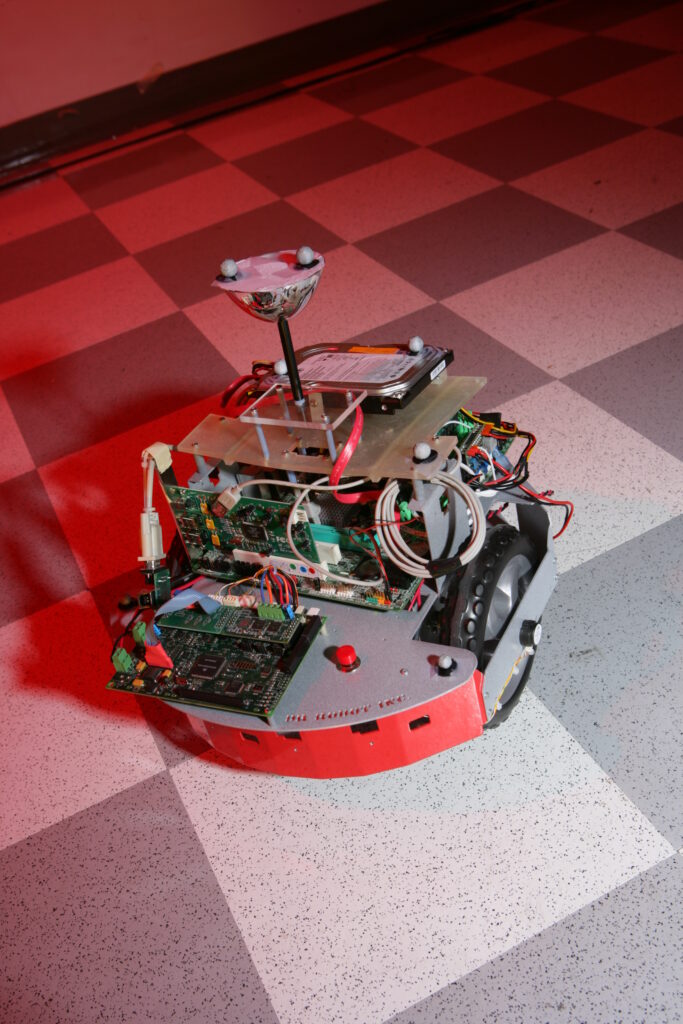
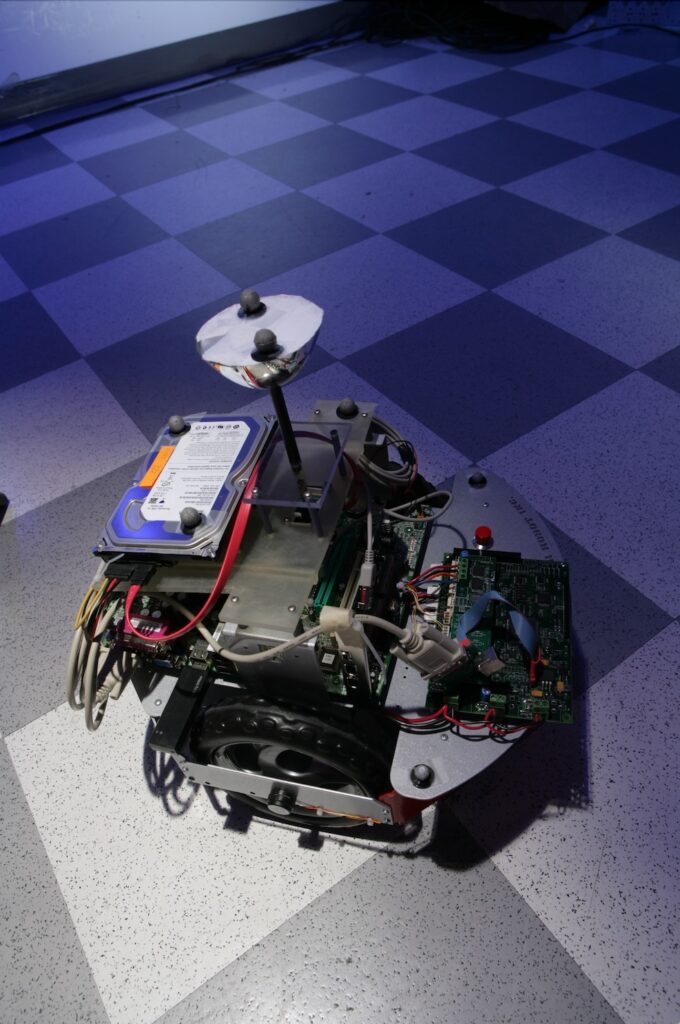
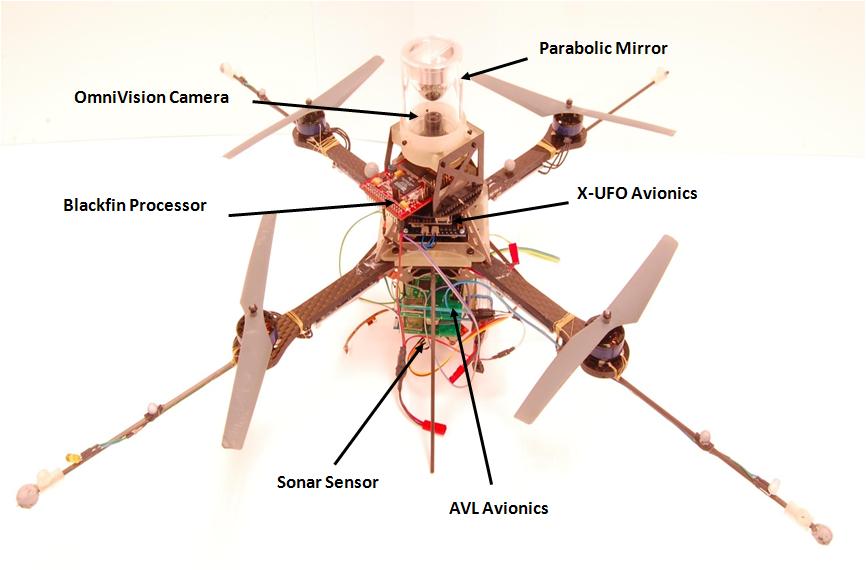
Flying insects display remarkable capabilities for local guidance and obstacle avoidance based on their visual sense. We have investigated the integration of biomimetic visual motion detection (Shoemaker, O’Carroll) for maneuvering, flight control and collision avoidance on ground and aerial platforms. The control theory (Humbert) is based on a model for wide-field neurons (tangential cells) that spatially integrate local optic flow estimates. The outputs of these integrators are applied as feedback signals for direct control of vehicle dynamics. When combined, these algorithms provide a reflexive capability for avoiding collisions and centering in clutter.
Publications
Conroy JK, Gremillion G, Raganathan BN, Humbert JS, “Implementation of Wide-Field Integration of Optic Flow for Autonomous Quadrotor Navigation,” Autonomous Robots, Vol. 27, No. 3, pp.189-198, 2009, DOI: 10.1007/s10514-009-9140-0.
Shoemaker PA, Hyslop AM and Humbert JS, “Optic Flow Estimation on Trajectories Inspired by Closed-Loop Flight,” Biological Cybernetics, Vol. 104, No. 4, pp. 339-350, 2011, DOI:10.1007/s00422-011-0436-8.
Xu P, Humbert JS, Abshire P, “Analog VLSI Implementation of Wide-Field Integration Methods,” Journal ofIntelligent and Robotic Systems, Vol. 64, No. 3, pp. 465-487, 2011, DOI: 10.1007/s10846-011-9549-5.
Xu P, Abshire P, and Humbert JS, “Motion Image Sensor with On-chip Adaptation and Programmable Filtering,” International Conference on Circuits and Systems (ISCAS), Rio de Janeiro, Brazil, May 2011.
Shoemaker PA and Humbert JS, “Vision-Based Local Guidance and Collision Avoidance with Elaborated Motion Detection Models,” Autonomous Weapons Summit and GNC Challenges for Miniature Autonomous Systems Workshop, October 2010.
Humbert JS, Conroy JK, Neely C, and Barrows G, “Wide-Field Integration Methods for Visuomotor Control,” in Flying Insects and Robots, Springer Verlag, 2009, DOI: 10.1007/978-3-540-89393-6_5.
Humbert JS, Hyslop AM, and Chinn M, “Experimental Validation of Wide-Field Integration Methods for Autonomous Navigation,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, 2007.
Conroy JK and Humbert JS, “Wide-Field Integration for Corridor Navigation of a Micro Helicopter,” IROSWorkshop on Visual Guidance Systems for Small Autonomous Aerial Vehicles, Nice, France, September 2008.
Shoemaker PA and Humbert JS, “Progress on Bio-Inspired Visual Navigation,” GNC Challenges for Miniature Autonomous Systems Workshop, October 2008.
Humbert JS, Murray RM, and Dickinson MH, “A Control-Oriented Analysis of Bio-Inspired Visuomotor Convergence,” 44th IEEE Conference on Decision and Control, pp. 245-250, Seville, Spain, 2005.
Humbert JS, Murray RM, and Dickinson MH, “Pitch-Altitude Control and Terrain Following Based on Bio-Inspired Visuomotor Convergence,” AIAA Conference on Guidance, Navigation and Control, AIAA 2005-6280, San Francisco, CA, 2005. Winner of best conference paper award.
Humbert JS, Murray RM, and Dickinson MH, “Sensorimotor Convergence in Visual Navigation and Flight Control Systems,” 16TH IFAC World Congress, Prague, 2005.