
Sponsor: US Army VTD (Mark Valco)
Investigators: PI: Sean Humbert (UMD), Co-PIs: Paul Samuel (Daedalus Flight Systems)
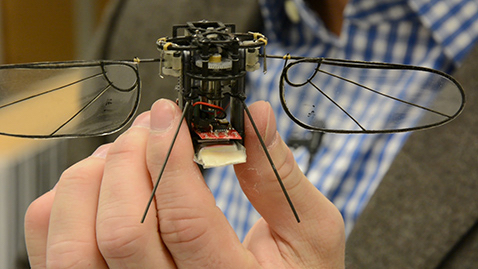
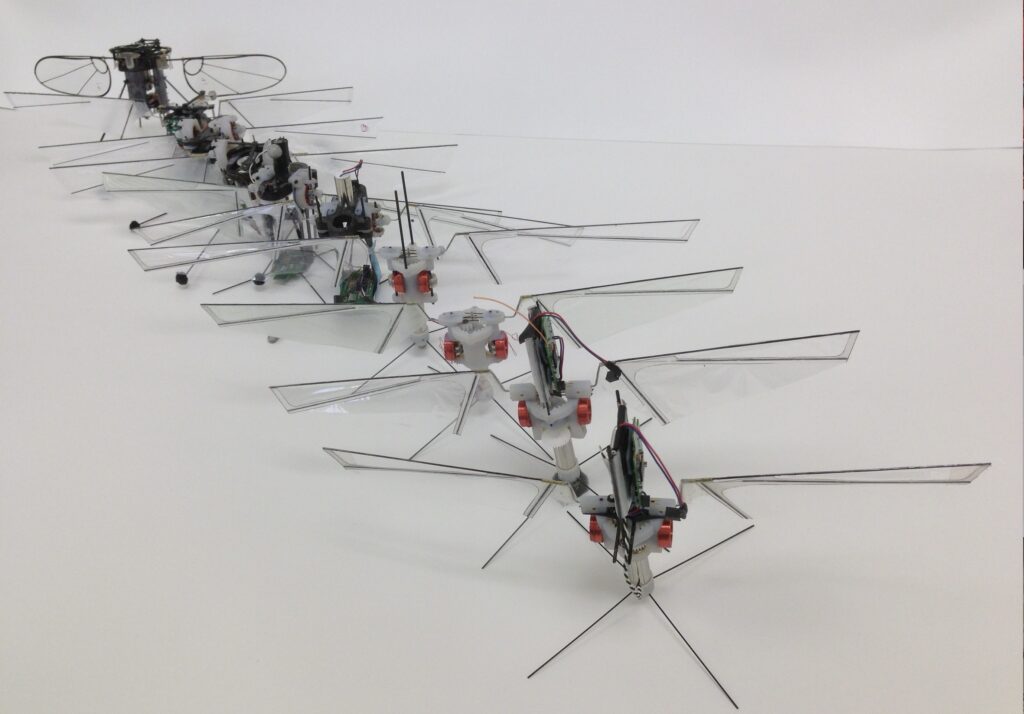
The HawkMoth project is focused on the development of a hover-capable flapping wing nanoscale UAV. The fundamental objective of the project is to develop a vehicle that possesses agility approaching that seen in both hawk moths and hummingbirds. Hence, the configuration under consideration has a target mass of 10 grams and a wing span on the order of 150 mm, and consists of two flapping wings that provide both thrust and primary control forces. It has been theorized that, during hover, insects and humming birds achieve fine, precise control of their wings by using small muscles to make fine adjustments of the stiffness of the wing hinge rather than changing the gross geometry of the hinge. Thus, wing hinge compliance modification will be investigated as the primary means for controlling the HawkMoth UAV. In addition, it has been observed that during hover, both hawk moths and humming birds constantly move their abdomens in a rapid twitching motion. It is theorized that this motion provides stability augmentation primarily though an inertial mechanism. Thus, the use of an active, nonaerodynamic tail will be investigated as a meant for hover stability augmentation in the HawkMoth UAV.
Publications
- Samuel PD, Faruque I and Humbert JS, “Flapping Wing Aerial Vehicles,” US Patent No. US 10,017,248, 2018.
- Faruque IA, Samuel PD and Humbert JS, “Moment Generation of Stabilizing Axes for Insect-Inspired Flapping Wing Flight,” AIAA Atmospheric Flight Mechanics Conference, AIAA Aviation and Aeronautics Forum and Exposition, Atlanta, GA, June 2014.
- Faruque IA, Samuel PD and Humbert JS, “Yaw Dynamics Identification of an Insect-Inspired Flapping Wing Micro Air Vehicle,” AIAA Guidance, Navigation, and Control at SciTech 2014, National Harbor, MD, Jan 13-17, 2014.
- MacFarlane M and Humbert JS, “Forward Flight Dynamics of an Insect-Inspired Flapping Wing Micro Air Vehicle,” AHS International Specialists’ Meeting on Unmanned Rotorcraft and Network Centric Operations, Scottsdale, AZ, Jan 2013.
- Penskiy I, Samuel PD, Humbert JS and Bergbreiter S, “A Bio-inspired Active Tail Control Actuator for Nano Air Vehicles,” IEEE Conference on Robotics and Automation (ICRA), St. Paul, MN, May 2012
- Gremillion G, Samuel PD and Humbert JS, “Yaw Feedback Control of a Bio-Inspired Flapping Wing Vehicle,” Proceedings of the SPIE Conference on Defense, Security and Sensing, 8373, Baltimore, MD, May 2012.