
Sponsor: ARL
Investigators: Sean Humbert (CU – MCE Thrust Lead); Vijay Kumar (UPenn – CNC Thrust Lead); Kamal Sarabandi (Michigan – SPP Thrust Lead); Larry Matthies (JPL – JX Thrust Lead)
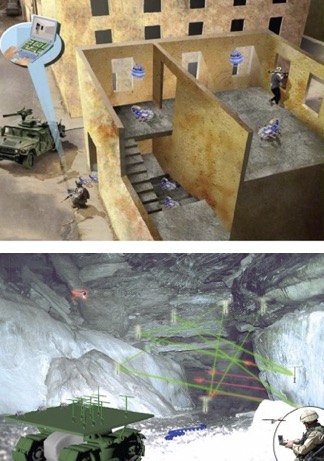
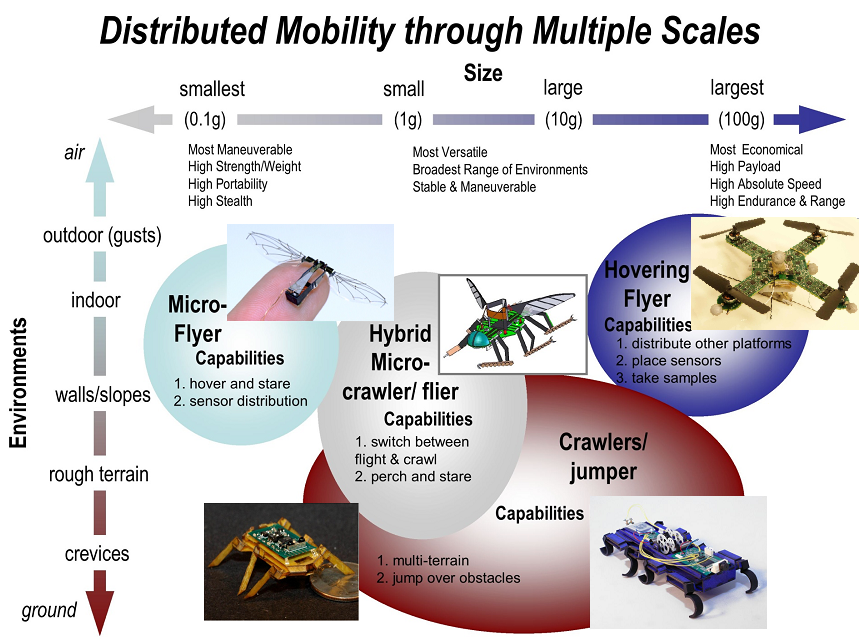
The MAST vision is to enhance tactical situational awareness in urban and complex terrain by enabling the autonomous operation of a collaborative ensemble of multi-functional, mobile micro-systems through collaborative and multidisciplinary research. The MAST Consortium is working towards creating systems of diverse autonomous mobility platforms equipped with miniature sensors to quickly, quietly, and reliably explore and find targets in the MAST scenarios. These platforms will exploit size (tradeoffs between payload, minimum exploitable opening, speed, range, and duration), diversity of locomotion (flight and ambulation), multiple units (redundancy, communication network, observation angles), and diversity of sensing (passive and active, local and long range). Four MAST Thrusts were established to develop these capabilities:
MOBILITY, CONTROL, & ENERGETICS (MCE): MCE develops a fundamental understanding of mechanics for small unmanned air and ground vehicles as needed to obtain desired mobility objectives. The aero-mechanics discipline focuses on key elements of micro-system flight; the ambulation discipline focuses on key elements of micro-system ground movement.
SENSING, PERCEPTION, & PROCESSING (SPP): SPP provides the fundamental underpinning for autonomous operation of distrusted, mobile, multi modal sensing micro-systems. Areas of investigation include control for mobility and situational awareness, distributed sensing and estimation, algorithmic aspects of communication, and architectures for cooperative reconnaissance by a heterogeneous set of micro air and ground vehicles.
COMMUNICATION, NETWORKING, & COORDINATION (CNC): CNC is concerned with the use of communication for carrying out mission objectives, optimizing the network connectivity amongst the heterogeneous ensemble of robots using the ratio, and coordinating the functions of each robot in the ensemble to enable the functioning of the team and optimize the mission objectives.
JOINT EXPERIMENTS (JX): The three core research thrusts (MCE, SPP, CNC) address capability gaps at the level of component technologies. The JX thrust serves as a focal point to integrate and evaluate technical capabilities on platforms performing elements of mission-like scenarios, through a set of research tasks that involve collaboration between multiple Centers and between the Consortium and ARL. MAST Projects being performed at CU include: Bio-Inspired Sensorimotor Control for MAST-Scale Platforms; System Identification of MAST-Scale Platforms; Integrated Air-Surface Operation for Micro Air Vehicles.
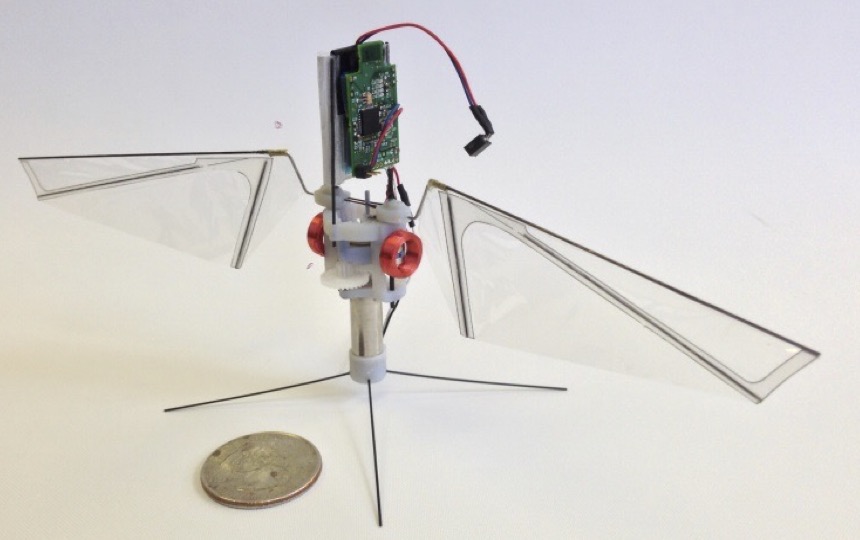
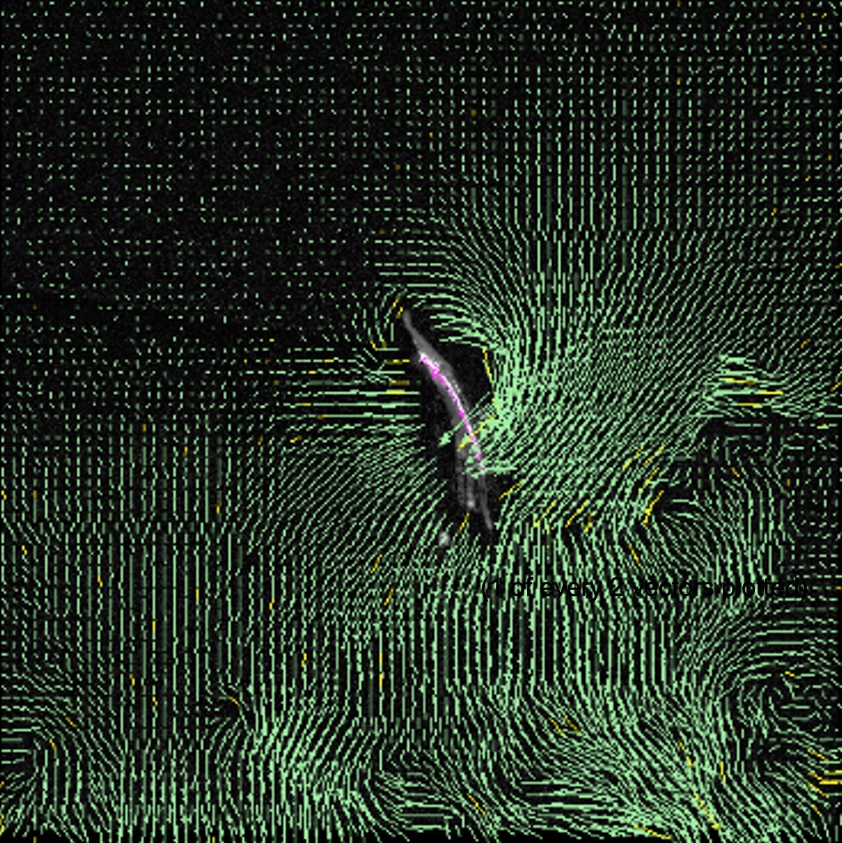





While research over the last 10 years has provided critical insight into the aerodynamic basis of micro-scale flight, formalization of the underlying principles for transition to engineered systems is significantly lacking. Our research objective for this project is threefold:
- Leverage tools from system identification and dynamical systems theory to generate a rigorous formulation of reduced order flight dynamics about hover and maneuvering flight
- Use these results to characterize the sensing and feedback requirements; and
- Provide a comprehensive methodology and set of feedback control principles for the use of unsteady aerodynamics on oscillating and rotating appendages to generate both lift and maneuvering forces that achieve robust flight stabilization of micro-scale autonomous flying platforms.
Publications
- Hrishikeshavan V, Humbert JS and Chopra I, “Controllability and Disturbance Gramian Analysis of a Shrouded Rotor Micro Air Vehicle,” AIAA Journal of Guidance, Control and Dynamics, Vol. 37, No. 5, pp. 1684-1691, 2014, DOI: 10.2514/1.G000066.
- Hrishikeshavan V, Shrestha E, Chopra I and Humbert JS, “Controllability Analysis of a Quadrotor in Hover Using Empirical Gramians,” AHS Specialists’ Meeting on Unmanned Rotorcraft Network Centric Operations, Mesa, AZ, Jan 2017.
- Gremillion G and Humbert JS, “Disturbance Rejection with Distributed Acceleration Sensing for Small Unmanned Aircraft Systems,” AIAA Journal, Vol. 54, No. 8, pp. 2233-2246, 2016, DOI: 10.2514/1.J054408.
- Gardner RC and Humbert JS, “Comparative Framework for Maneuverability and Gust Tolerance of Micro Helicopters,” AIAA Journal of Aircraft, Vol. 51, No. 5, pp. 1546-1553, 2014, DOI: 10.2514/1.C032406.
- Hrishikeshavan V, Humbert JS and Chopra I, “Controllability and Disturbance Gramian Analysis of a Shrouded Rotor Micro Air Vehicle in Hover,” AHS International Specialists’ Meeting on Unmanned Rotorcraft and Network Centric Operations, Scottsdale, AZ, Jan 2013.
- Gardner R, Humbert JS and Chopra I, “Maneuverability Comparison of Flybar and Flybarless Micro-Helicopters,” AHS International Specialists’ Meeting on Unmanned Rotorcraft and Network Centric Operations, Scottsdale, AZ, Jan 2013.
- Faruque IA, Muijres FT, Macfarlane K, Kehlenbeck A, Humbert JS, “Identification of Optimal Feedback Control Rules from Micro-Quadrotor and Insect Flight Trajectories,” Biological Cybernetics, Vol. 112, No. 3, pp. 165-179, 2018. DOI: 10.1007/s00422-017-0742-x.
- Maio A, Ranganathan B, Gremillion G, Nothwang W and Humbert JS, “Acceleration Feedback Control for Fixed-Wing sUAS,” IEEE Aerospace Conference, Big Sky, Montana, Mar 2018. DOI: 10.1109/AERO.2018.8396639.
- MacFarlane K and Humbert, JS, “Lagrangian Flow Structures Around a Flapping Wing,” AIAA Atmospheric Flight Mechanics Conference at SciTech, Kissimmee, FL, Jan 4-9, 2015.
- MacFarlane K, Faruque IA and Humbert JS, “Power Regulation of Kinematic Control Inputs for Forward Flying Drosophila,” Acta Mechanica Sinica, Vol. 30, No. 6, pp. 809-818, 2014, DOI:10.1007/s10409-014-0094-x.
- Faruque IA and Humbert JS, “Wing Motion Transformation to Evaluate Aerodynamic Coupling in Flapping Wing Flight,” Journal of Theoretical Biology, Vol. 363, pp. 198-204, 2014, DOI: 10.1016/j.jtbi.2014.07.026.
- MacFarlane M and Humbert JS, “Forward Flight Dynamics of an Insect-Inspired Flapping Wing Micro Air Vehicle,” AHS International Specialists’ Meeting on Unmanned Rotorcraft and Network Centric Operations, Scottsdale, AZ, Jan 2013.
- Conroy J, Kehlenbeck A, and Humbert JS, “Characterization and Enhancement of Micro Brushless DC Motor Response,” Proceedings of the SPIE Defense and Security, International Society for Optimal Engineering Conference, Baltimore, MD, 2014.
- Faruque I, MacFarlane K and Humbert JS, “Reduced Order Forward Flight Dynamics Models for Dipteran Insects,” AIAA Conference on Guidance, Navigation, and Control, Minneapolis, MN, Aug 2012.
- Penskiy I, Samuel PD, Humbert JS and Bergbreiter S, “A Bio-inspired Active Tail Control Actuator for Nano Air Vehicles,” IEEE Conference on Robotics and Automation (ICRA), St. Paul, MN, May 2012.
- Vandenheede RBR, Bernal LP, Morrison CL and Humbert JS, “Force Generation of Bio-Inspired Hover Kinematics” AIAA Aerospace Sciences Meeting, Nashville, TN, January 2012.
- Gremillion G, Samuel PD and Humbert JS, “Yaw Feedback Control of a Bio-Inspired Flapping Wing Vehicle,” Proceedings of the SPIE Conference on Defense, Security and Sensing, 8373, Baltimore, MD, May 2012.
- Conroy JK, Humbert JS, and Pines DJ, “System Identification of a Rotary Wing Micro Air Vehicle,” Journal of the American Helicopter Society, Vol. 56, No. 2, 2011.
- Faruque I and Humbert JS, “Reduced Order Roll/Yaw Model for Dipteran Flapping Forward Flight,” AIAA Conference on Guidance, Navigation, and Control, AIAA-2010-8233, Portland, OR, August 2011.
- Gerardi S, Humbert JS, Pierce L, and Sarabandi K, “Velocity Estimation Using Optic Flow and Radar,” SPIE Proceedings 8031, Orlando, FL, June 2011.
- Macfarlane M, Bush B, Faruque I, Humbert JS, and Baeder J, “Quasi-Steady and Computational Aerodynamics Applied to Hovering Drosophila Dynamics,” 29th Applied Aerodynamics Conference, Honolulu, Hawaii, June 2011.
- Pierce L, Humbert JS, Gerardi S, Sarabandi K, and Moallem M “Combined radar and Optical Flow Navigation for Flying Robots in Urban Areas,” International Symposium on Antennas and Propagation and UNSC/USRI National Radio Science Meeting, July 2011.
- Humbert JS and Faruque I, “Analysis of Insect-Inspired Wingstroke Kinematic Perturbations for Longitudinal Control,” AIAA J. of Guidance, Control and Dynamics, Vol. 34, No. 2, pp. 618-623, 2011, DOI: 10.2514/1.51912.
- Faruque I and Humbert JS, “Dipteran Insect Flight Dynamics: Part 2: Lateral-Directional Motions About Hover,” Journal of Theoretical Biology, Vol. 265, No. 3, pp. 306-313, 2010, DOI: 10.1016/j.jtbi.2010.05.003.
- Faruque I and Humbert JS, “Dipteran Insect Flight Dynamics: Part 1: Longitudinal Motions about Hover,” Journal of Theoretical Biology, Vol. 264, No. 2, pp. 538-552, 2010, DOI: 10.1016/j.jtbi.2010.02.018.
- Bush B, Macfarlane M, Baeder J and Humbert JS, “Development of Immersed Boundary Code with Applications to MAV Stability Analysis,” Army Science Conference, November 2010.
- Zarovy S, Costello M, Mehta A, Gremillion G, Miller DS, Ranganathan B, Samuel PD, and Humbert JS, “Experimental Study of Gust Effects on Micro Air Vehicles,” AIAA Conference on Atmospheric Flight Mechanics, AIAA-2010-7818, Toronto, Canada, 2010.
- Gremillion G and Humbert JS, “System Identification of a Quadrotor Micro Air Vehicle,” AIAA Conference on Atmospheric Flight Mechanics, AIAA-2010-7644, Toronto, Canada, 2010.
- Miller DS, Gremillion G, Ranganathan B, Samuel PD, Zarovy S, Costello M, Mehta A, and Humbert JS, “Challenges Present in the Development and Stabilization of a Micro Quadrotor Helicopter,” Autonomous Weapons Summit and GNC Challenges for Miniature Autonomous Systems Workshop, October 2010.
- Grauer J, Conroy JK, Hubbard JE Jr, and Humbert JS, “System Identification of a Miniature Helicopter,” AIAA Journal of Aircraft, Vol. 46, No. 4, pp. 1260-1269, 2009, DOI: 10.2514/1.40561.
- Grauer J, Conroy JK, Hubbard JE Jr, Humbert JS, and Pines DJ, “Field Calibration of Inertial Measurement Units for Miniature Unmanned Aircraft,” AIAA Infotech at Aerospace Conference, AIAA-2009-2064, Seattle, WA, 2009.
- Humbert JS, Chopra I, Fearing RS, Full RJ, Wood RJ and Dickinson MH, “Development of Micromechanics for Micro Autonomous Systems (ARL-MAST CTA Program),” SPIE Proceedings 7318, April, 2009.
- Grauer J, Conroy JK, Hubbard JE Jr, and Humbert JS, “System Identification of a Miniature Helicopter,” AIAA Atmospheric Flight Mechanics Conference, AIAA-2008-6898, Honolulu, Hawaii, 2008.