HomeProjectsBio-Inspired Sensing and Hierarchical GN&C for Traversing Urban Clutter
Bio-Inspired Sensing and Hierarchical GN&C for Traversing Urban Clutter
Sponsor: AFRL-WPAFB (Mark Mears) Investigators: PI: Jim Paduano (Aurora Flight Sciences), CoPIs: Sean Humbert (UMD), Tim Horiuchi (UMD)
As micro air vehicles transition from demonstrators to field-usable vehicles, the necessity for avionics tailored to their unique needs becomes more severe. MAVs operating at low altitude in cluttered urban environments will encounter both large and small obstacles that may be fixed or moving, and whose position is not known in advance. In order to fully realize the benefits of these vehicles, they must incorporate autonomous detection and avoidance capabilities. Given the tight resource constraints on MAVs, the challenge is not just to enable these capabilities, but also to implement them within a small and light enough package to be accommodated on a MAV, without requiring too much power.
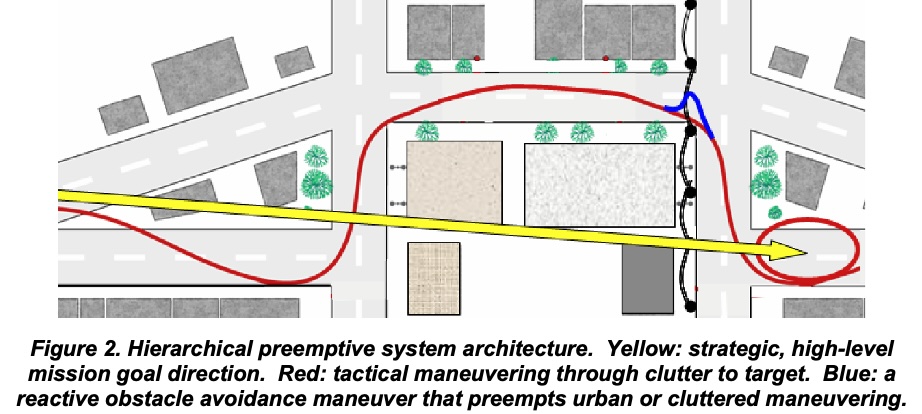
In this project we combine optic flow based negotiation through mid-field clutter using wide-field integration (WFI) techniques (Humbert), active sensing of imminent collisions using bat-inspired echolocation sensing (Horiuchi), and hierarchical application of behavioral and automaton-based navigation and maneuvering strategies (Paduano) to enable autonomous vehicles to conduct military intelligence, surveillance, and reconnaissance (ISR) missions in challenging and uncertain environments.
Publications
Keshavan J and Humbert JS, “A H-infinity Loopshaping Framework for Bio-Inspired Reflexive Visual Navigation in 3D Urban Environments,” Journal of Robotics and Autonomous Systems, Vol. 62, No. 8, pp. 1085-1097, 2014, DOI: 10.1016/j.robot.2014.05.005.
Keshavan J and Humbert JS, “A H-infinity Loopshaping Approach for Autonomous Bio-Inspired Visual Navigation in Three-Dimensional Urban Environments,” IEEE Conference on Decision and Control, Maui, Hi, Dec 2012.
Keshavan J and Humbert JS, “A H-infinity Loopshaping Approach for Optic Flow Based Visual Navigation,” AIAA Conference on Guidance, Navigation, and Control, Minneapolis, MN, Aug 2012.
Keshavan J and Humbert JS, “A H-infinity Controller Synthesis Framework for Vision-Based Obstacle Avoidance Applications,” ICME Conference on Complex Medical Engineering, Kobe, Japan, July 2012.
Hyslop AM and Humbert JS, “Autonomous Navigation in 3-D Urban Environments Using Wide-Field Integration of Optic Flow,” AIAA Journal of Guidance, Control, and Dynamics, Vol. 33, No. 1, pp.147-159, 2010, DOI: 10.2514/1.43778.
Hyslop AM and Humbert JS, “Wide-Field Integration Methods for Autonomous Navigation in 3-D Environments,” AIAA Conference on Guidance, Navigation, and Control, Paper AIAA 2008-7252, Honolulu, HI, 2008.