
Sponsor: ONR (Marc Steinberg)
Investigators: PI: Kristi Morgansen (UW), Co-PIs: Sean Humbert (UMD), Tim Horiuchi (UMD), Jason Vance (College of Charleston)
The extraordinary flight behavior of insects is characterized by robust flight performance in heterogeneous environments, consisting of gusts and turbulence that form around natural and man-made landscapes. This level of performance requires high bandwidth inner loop closure facilitated by tight integration of low-latency sensing, processing, and actuation. Such information is typically mechanosensory; examples include gyroscopic sensing halteres of Dipterans and the antenna of hawkmoths, and flow sensitive hairs in insects and bats. Successful navigation is realized through coupling of the inner loop with higher latency, far field sensory modalities such as vision and echolocation. A major focus of the proposed research will be the analysis of experimental application of perturbations to flying animals, in the context of accurate flight dynamics and sensory processing models, to reveal how they utilize (and fuse) sensory data over different time scales.
Publications
- Keshavan J, Gremillion G, Escobar-Alvarez H and Humbert JS, “Autonomous Vision-Based Navigation of a Quadorotor in Corridor-Like Environments,” International Journal of Micro Air Vehicles, Vol. 7, No. 2, pp. 111-124, 2015. DOI: 10.1260/1756-8293.7.2.111.
- Keshavan J and Humbert JS, “A H-infinity Loopshaping Framework for Bio-Inspired Reflexive Visual Navigation in 3D Urban Environments,” Journal of Robotics and Autonomous Systems, Vol. 62, No. 8, pp. 1085-1097, 2014, DOI: 10.1016/j.robot.2014.05.005.
- Keshavan J, Gremillion G, Escobar-Alvarez H and Humbert JS, “A mu-analysis Based Controller Synthesis Framework for Robust Visual Navigation in Less-Structured Environments,” Bioinspiration and Biomimetics, Vol. 9, No. 2, 2014, DOI:10.1088/1748-3182/9/2/025011.
- Keshavan J and Humbert JS, “A H-infinity Loopshaping Approach for Autonomous Bio-Inspired Visual Navigation in Three-Dimensional Urban Environments,” IEEE Conference on Decision and Control, Maui, Hi, Dec 2012.
- Keshavan J and Humbert JS, “A H-infinity Loopshaping Approach for Optic Flow Based Visual Navigation,” AIAA Conference on Guidance, Navigation, and Control, Minneapolis, MN, Aug 2012.
- Keshavan J and Humbert JS, “A H-infinity Controller Synthesis Framework for Vision-Based Obstacle Avoidance Applications,” ICME Conference on Complex Medical Engineering, Kobe, Japan, July 2012.
- Vance JT, Faruque I, and Humbert JS, “Kinematic Strategies for Mitigating Gust Perturbations in Insects,” Bioinspiration and Biomimetics, Vol. 8, No. 1, 2013, DOI: 10.1088/1748-3182/8/1/016004.
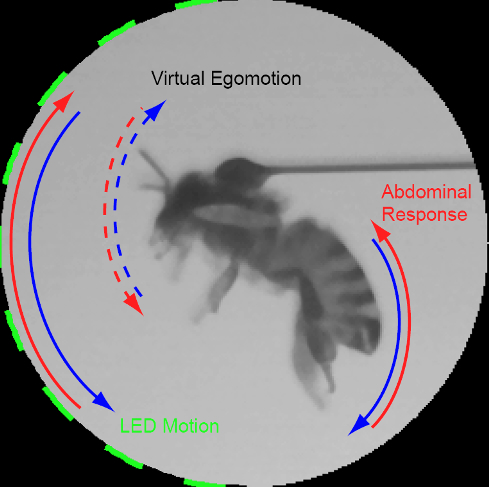
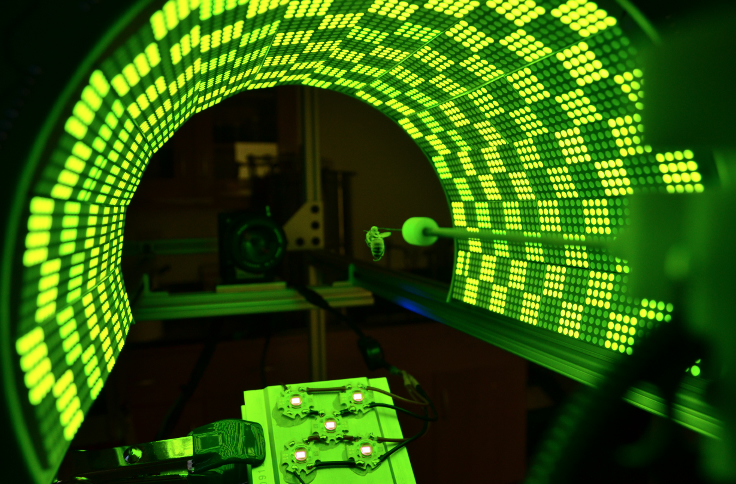
- Collett AN, Vance J and Humbert, JS, “Optomotor Response to Simulated Egomotion During Tethered Flight in Honey Bees, Apis mellifera,” Society of Integrative and Comparative Biology, Annual Meeting; Portland, OR, January 3-7, 2016.
- Vance J and Humbert, JS, “Optomotor Response to Simulated Yaw Rotations During Tethered Flight in Honey Bees, Apis mellifera,” Society of Integrative and Comparative Biology, Annual Meeting; Palm Beach, FL, January 3-7, 2015.
- Vance JT, Faruque IA and Humbert JS, “Strategies for Mitigating Gust Perturbations in Insects,” 7th Annual World Congress of Biomechanics, Boston, MA, July 6-11, 2014.
- Vance J, Faruque IA, and Humbert JS, “Mechanisms of Gust Rejection in Stalk-Eyed Flies,” 8th International Congress of Dipterology, Potsdam, Germany, August 10-15, 2014.
- Vance J and Humbert, JS, “Optomotor Response to Simulated Yaw Rotations During Tethered Flight in Apis mellifera,” Society of Integrative and Comparative Biology, Southeast Regional Meeting for Division of Vertebrate Morphology and Division of Comparative Biomechanics, Chapel Hill, NC, October 22, 2014.