HomeProjectsBio-Inspired Flow Sensing and Control for Autonomous Underwater Vehicles
Bio-Inspired Flow Sensing and Control for Autonomous Underwater Vehicles
Sponsor: ONR (Tom McKenna) Investigators: PI: Derek Paley (UMD), Co-PIs: Sean Humbert (UMD), Sheryl Coombs (BGSU), Xiaobo Tan (MSU)
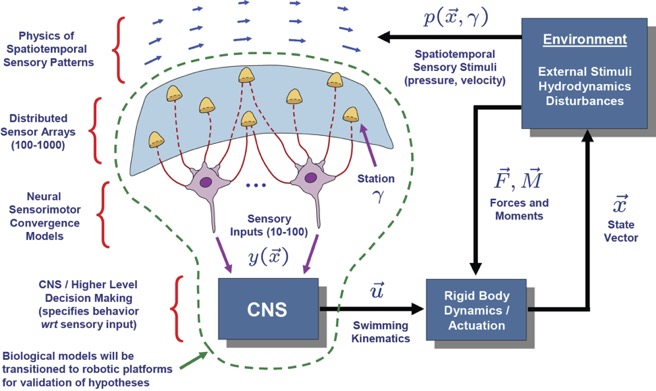
The long-term goal of this project is to understand the role of electrostatic and hydrodynamic sensing in fish behavior and to translate that understanding into the design of a closed-loop control system for an autonomous underwater vehicle. The specific research objective is to apply tools from neuroethology, information theory, materials science, and control theory to address the problem of spatial and submodal integration of flow information for feedback control in the underwater environment. The technical approach to reach this objective is to (1) conduct sensory deprivation experiments on fish that determine the contribution of hydrodynamic sensing to behavioral responses in spatially uniform and complex flows; (2) construct mathematical models for the assimilation of hydrodynamic signals into a feedback control system; (3) fabricate bioinspired flow-sensor arrays using electroactive polymers; and (4) design and demonstrate a prototype robotic system that uses closed-loop control with artificial flow-sensor arrays to implement bio-inspired behavior.
Publications
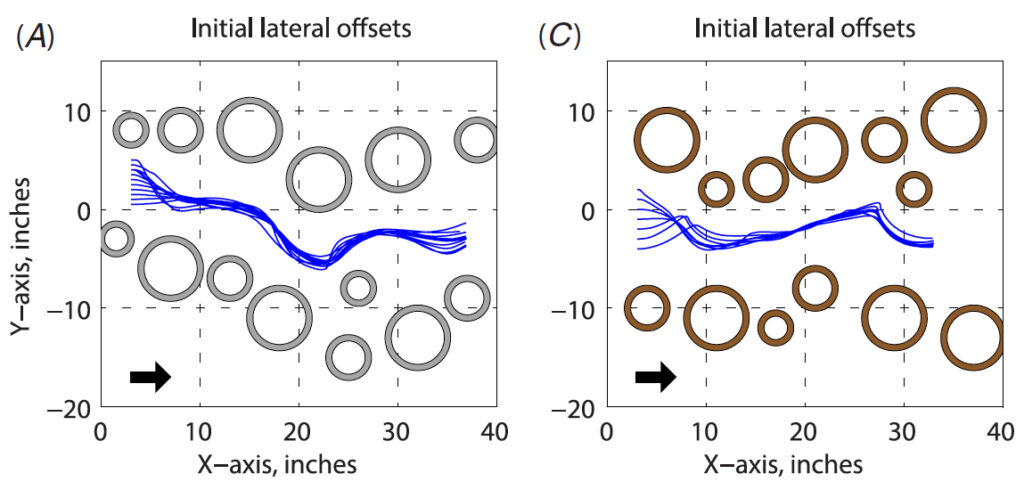
Dimble KD, Ranganathan, BN, Humbert JS and Keshavan, J, “Robust Analysis of an Underwater Navigational Strategy in Electrically Heterogeneous Corridors,” Bioinspiration and Biomimetics, Vol. 11, No. 4, 2016, DOI: 10.1088/1748-3190/11/4/045004.
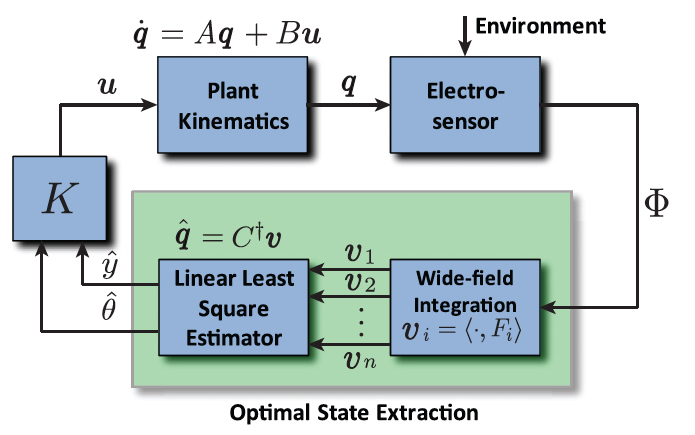
Dimble KD, Faddy JM and Humbert JS, “Extraction of Relative Proximity from Electrostatic Images Using Wide-Field Integration Methods,” Bioinspiration and Biomimetics, Vol. 9, No. 1, 2014, DOI: 10.1088/1748-3182/9/1/016012.
Ranganathan BN, Keshavan J and Humbert JS, “Computationally Efficient Underwater Navigational Strategy in Electrically Heterogeneous Environments using Electrolocation,” IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, May 2015.
Ranganathan BN, Dimble KD, Faddy JM and Humbert JS, “Underwater Navigation Behaviors Using Wide-Field Integration Methods,” IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, May 2013.
Dimble KD, Faddy JM and Humbert JS, “Extraction of Relative Proximity from Electrostatic Images Using Wide-Field Integration Methods,” American Control Conference, Baltimore, MD, 2010. Winner of best paper in session award.