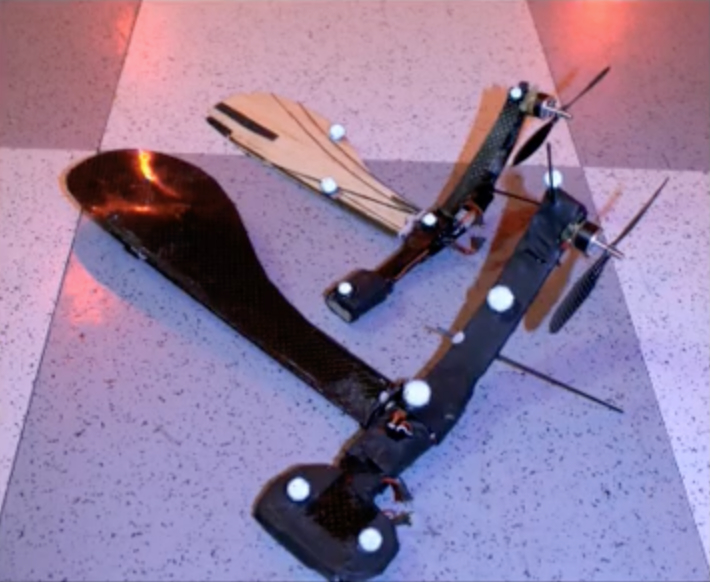
Micro/Nano Unmanned Aerial Systems (UAS) are an emerging class of vehicles uniquely suited to performing covert missions. Autonomy is an essential aspect of the intended function of UAS, and development of a dynamic model will enable control and state estimation algorithm synthesis. To that end, a linear model for the heave dynamics of a mechanical samara (winged seed) in hovering flight was identified from data collected external to the vehicle by a visual tracking system. Identification and error estimation efforts utilized a frequency response-based system identification. The two mechanical samara vehicles of different scale compared in this study represent the first demonstration of controlled flight of a vehicle of this kind.
Publications
Ulrich ER, Faruque I, Grauer J, Pines DJ, Humbert JS, and Hubbard JE, “Control Model for Robotic Samara: Dynamics about a Coordinated helical Turn,” AIAA J. Aircraft, Vol. 33, No. 6, pp. 1921-1927, 2010, DOI: 10.2514/1.50878.
Ulrich ER, Humbert JS, and Pines DJ, “From Falling to Flying: The Path to Powered Flight of a Robotic Samara Nano Air Vehicle,” Bioinspiration and Biomimetics, Vol. 5, No. 4, 2010. DOI: 10.1088/1748-3182/5/4/045007.
Ulrich ER, Pines DJ, and Humbert JS, “Pitch and Heave Control of Robotic Samara Micro Air Vehicles,” AIAA J. of Aircraft, Vol. 47, No. 4, pp. 1290-1299, 2010, DOI: 10.2514/1.47197.
Gerardi S, Ulrich E, Humbert JS and Pines DJ, “Hover Stabilization of a Controllable Mechanical Samara,” AIAA Conference on Atmospheric Flight Mechanics, AIAA-2010-7873, Toronto, Canada, 2010.
Ulrich E, Faruque I, Pines DJ, Humbert JS, “Control Model for Robotic Samara: Dynamics about a Coordinated Helical Turn,” American Controls Conference, Baltimore, MD, 2010, invited paper. Winner of best paper in session award.