
Sponsor: Lockheed Martin
Investigators: PI: Sean Humbert (CU); Co-PI: Chris Heckman (CU)

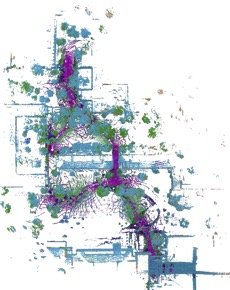
The majority of robotics literature focuses on the use of point clouds, occupancy grids or distance fields for 3D environment representation. While these methods have integrated seamlessly with SLAM capabilities, there are several disadvantages. In particular, these representations often require significant memory that grows with the size of the map and broadcasting large amounts of data is often not a feasible option. Moreover, when sent to humans, the above-mentioned environment representations are not convenient to infer situational awareness from, since they do not naturally lend themselves to higher-level abstraction. Another common challenge faced by the supervising human is to set a desired waypoint for the path planner on an non-intuitive occupancy grid or point cloud map especially because the waypoint is typically provided as a point in the 3D space.
Using a higher-level semantic map immediately informs the human operator about the environment layout and provides an efficient data structure to be transmitted over a communication channel. Receiving a semantic map from a robot provides an intuitive situational awareness to a supervising human, however, if a robot needs to truly interact with a human it also needs to be able to accept desired waypoints in the form of semantics. While there has been some work in the area of semantic mapping, decision-making using such kind of abstract data is not a well-explored frontier in robotics which would allow a robot to accept waypoints in the form of semantics.
Publications
- Ahmad S and Humbert JS, “Sampling-Based Planning and Semantic Navigation for Complex Large-Scale Environments,” Journal of Robotics and Autonomous Systems, (under review)
- Ahmad S and Humbert JS, “Efficient Sampling-Based Planning for Subterranean Exploration,” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 2022, pp. 7114-7121, DOI: 10.1109/IROS47612.2022.9982169.