Sponsor: DARPA TTO Investigators: PI: Sean Humbert (CU), Co-PIs: Chris Heckman (CU), Eric Frew (CU), Steve McGuire (UCSC)
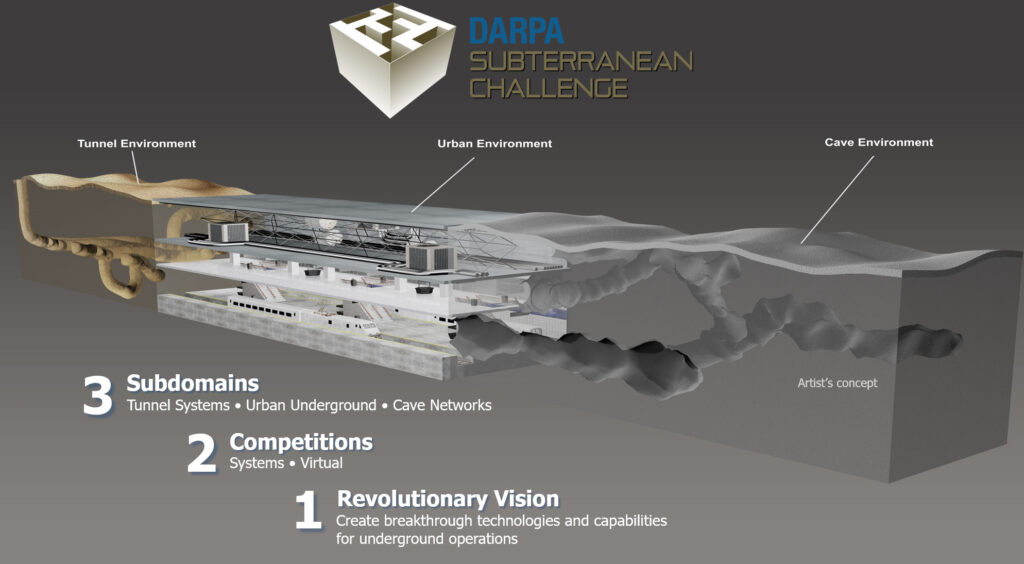
While the capabilities of autonomous systems have been steadily improving in recent years, these systems still struggle to rapidly explore previously unknown environments without the aid of GPS-assisted navigation. The DARPA Subterranean (SubT) Challenge aimed to fast track the development of autonomous exploration systems by evaluating their performance in real-world underground search-and-rescue scenarios. Subterranean environments present a plethora of challenges for robotic systems, such as limited communications, complex topology, visually-degraded sensing, and harsh terrain. The Final Event was composed of three subdomains, including tunnel systems, urban underground, and cave networks.
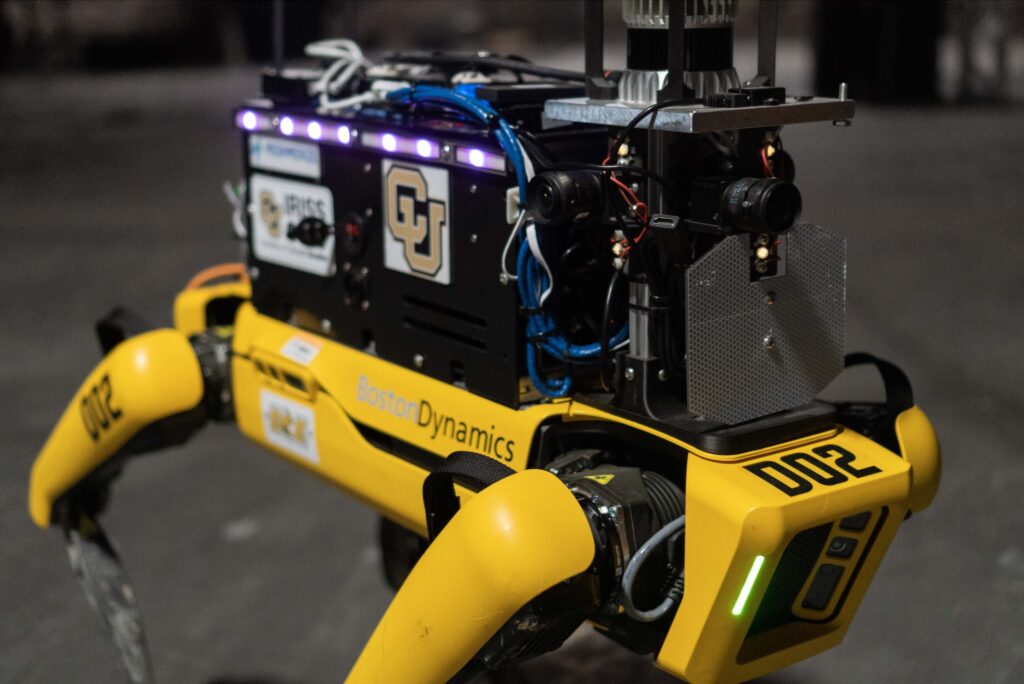
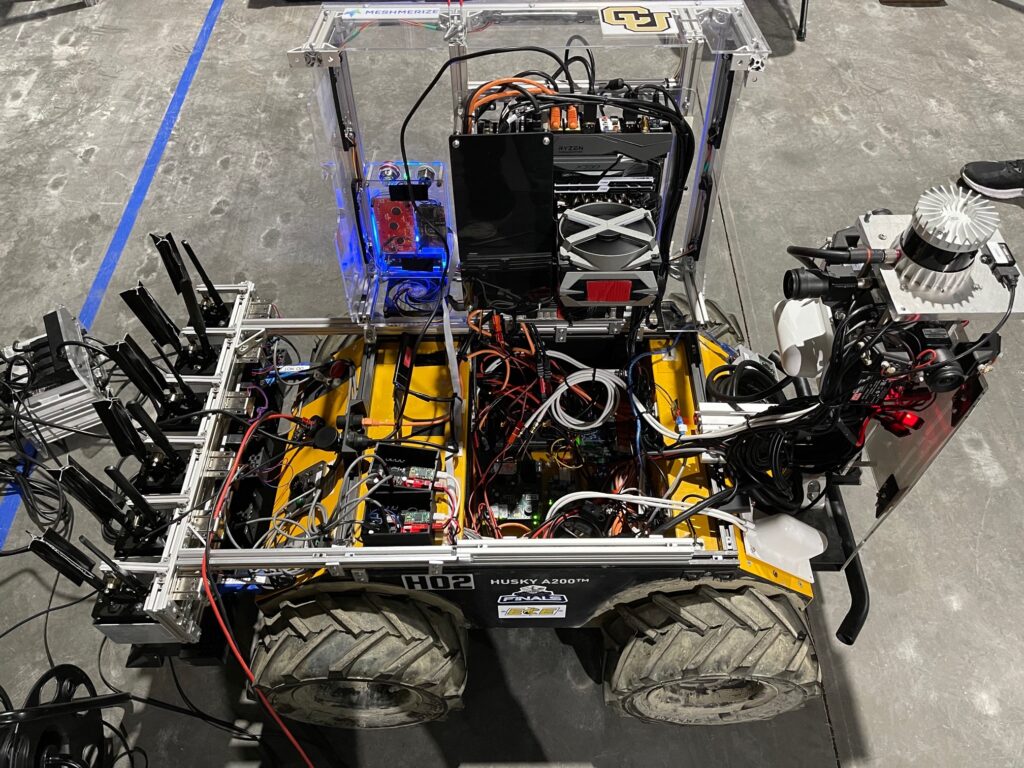
Team MARBLE (Multi-agent Autonomy with Radar-based Localization for Exploration) placed third, earning the $500K prize and was the top US team in the competition. Our solution enables long-term autonomy with minimal human supervision by combining a powerful and independent single-agent autonomy stack, with higher level mission management operating over a flexible mesh network. The autonomy suite deployed on quadruped and wheeled robots was fully independent, freeing the human supervision to loosely supervise the mission and make high-impact strategic decisions.
Publications
Rush ER, Heckman C, Jayaram K, Humbert JS, “Neural Dynamics of Robust Legged Robots,” Frontiers in Robotics and AI, 2024, 11:1324404. DOI: 10.3389/frobt.2024.1324404.
Biggie H, Rush E, Riley DG, Ahmad S, Ohradzansky MT, Harlow K, Miles MJ, Torres D, McGuire S, Frew EW, Heckman C and Humbert JS, “Flexible Supervised Autonomy for Exploration in Subterranean Environments,” Field Robotics, Vol. 3, No. 1, pp. 125-189, 2023, DOI: 10.55417/fr.2023004.
Ohradzansky M, Rush E, Riley D, Mills A, Ahmad S, McGuire S, Biggie H, Harlow K, Miles M, Frew E, Heckman C and Humbert, JS, “Multi-Agent Autonomy: Advancements and Challenges in Subterranean Exploration.” Field Robotics, Vol. 2., pp. 1068-1104, 2022. DOI:10.55417/fr.2022035.
Ohradzansky MT and Humbert, JS, “Lidar-Based Navigation of Subterranean Environments Using Bio-Inspired Wide-Field Integration of Nearness,” Sensors, Vol. 22, No. 3, 2022. DOI: 10.3390/s22030849.
Ahmad S and Humbert JS, “Efficient Sampling-Based Planning for Subterranean Exploration,” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 2022, pp. 7114-7121, DOI: 10.1109/IROS47612.2022.9982169.
Ahmad S, Turin Z and Humbert JS, “Bio-Inspired Obstacle Avoidance using Wavelet-Based Element Analysis,” 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE), Mexico City, Mexico, 2022, pp. 2307-2313, DOI: 10.1109/CASE49997.2022.9926537.
Ahmad S, Sunberg ZN and Humbert JS, “End-to-End Probabilistic Depth Perception and 3D Obstacle Avoidance using POMDP,” Journal of Intelligent & Robotic Systems, Vol. 103, No. 2, 2021. DOI: 10.1007/s10846-021-01489-w.
Ahmad S, Mills AB, Rush ER, Frew EW and Humbert JS, “3D Reactive Control and Frontier-Based Exploration for Unstructured Environments,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, Sept 27-Oct 1, 2021.
Ahmad S, Sunberg ZN and Humbert JS, “Probabilistic Depth Perception for 3D Reactive Obstacle Avoidance,” American Control Conference, New Orleans, LA, May 25-28, 2021.
Mwaffo V, De Lellis P and Humbert JS, “Formation Control of Stochastic Multi-Vehicle Systems,” IEEE Transactions on Robotics, Vol. 29, No. 6, pp. 2505-2516, 2021. DOI: 10.1109/TCST.2020.3047422.
Ohradzansky MT, Mills AB, Rush ER, Riley DG, Frew EW and Humbert JS, “Reactive Control and Metric-Topological Planning for Exploration,” International Conference on Robotics and Automation (ICRA), Paris, France, May 2020.
Loefgren I, Ahmed N, Frew E, Heckman C, and Humbert JS, “Scalable Event-triggered Data Fusion for Autonomous Cooperative Swarm Localization,” International Conference on Information Fusion (FUSION 2019), Ottawa, Canada, July 2019.
Mwaffo V, Keshavan J, Hedric T and Humbert JS, “Detecting Switching and Intermittent Leadership in Networks of Coupled Dynamical Systems,” Scientific Reports, Vol. 8, No. 1, 2018. DOI: 10.1038/s41598-018-28285-1.
Mwaffo V, Keshavan J, Hedric T and Humbert JS, “A Data-Driven Method to Dissect the Dynamics of Causal Influence in Complex Dynamical Systems,” IEEE Workshop on Complexity Engineering (COMPENG), Florence, Italy, 2018.